scikit-kinematics - Documentation¶
scikit-kinematics is a library for scientific data analysis, with a focus on 3d kinematics.
It is hosted under https://github.com/thomas-haslwanter/scikit-kinematics, and contains the following modules:
- imus Analysis routines for IMU-recordings
calculation of orientation from velocity, recorded with IMUs or space-fixed systems (four different algorithms are implemente here:
simple quaternion integration
a quaternion Kalman filter
Madgwick’s algorithm
Mahony’s algorithm
calculation of position and orientation from IMU-signals
The sub-directory sensors contains utility to import in data from xio, XSens, and yei system
- markers Analysis routines for 3D movements from marker-based video recordings
a function that takes recordings from video-systems (e.g. Optotrak) and calculates position and orientation
calculation of joint movements from marker recordings
- quat Functions for working with quaternions:
quaternion multiplication, inversion, conjugate
conversions to rotation matrices, axis angles, vectors
a Quaternion class, including operator overloading for multiplication and division
also work on data arrays
- rotmat Functions for working with rotation matrices
2D rotation matrices, and 3D for rotations about the x-, y-, and z-axis
symbolic rotation matrices
conversions to Euler, Fick, Helmholtz angles
spatial transformation matrices
Denavit-Hartenberg transformations
- vector Functions for working with vectors
angle between vectors
Gram-Schmidt orthogonalization
projection
normalization
rotation
also work on data arrays
simulation Functions to simulate ideal IMU-signalsG
- view Visualization of time-series data, and of 3D orientations.
Note: Since 2021 Mac OSX no longer supports OpenGL. As a consequence, the module view is no longer automatically loaded, but has to be imported separately, with e.g. from skinematics import view!
In addition, the packages includes the general module
misc Mainly GUI-functions for directory- and file selection etc.
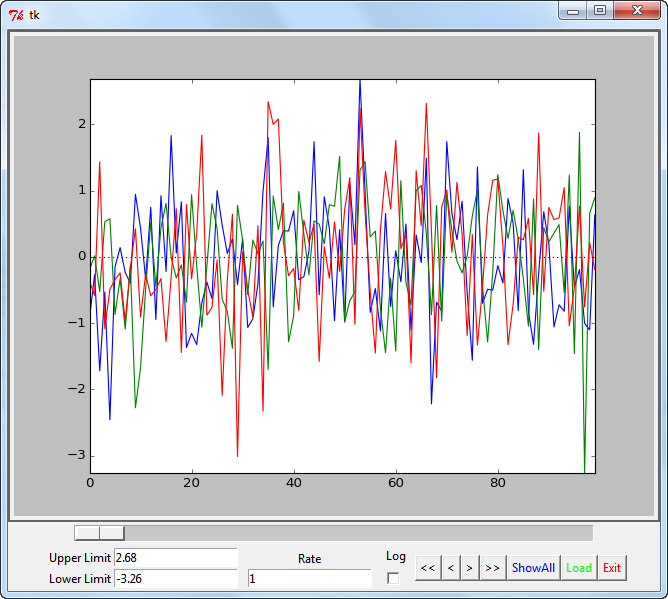
Interactively analyze time-series data.¶
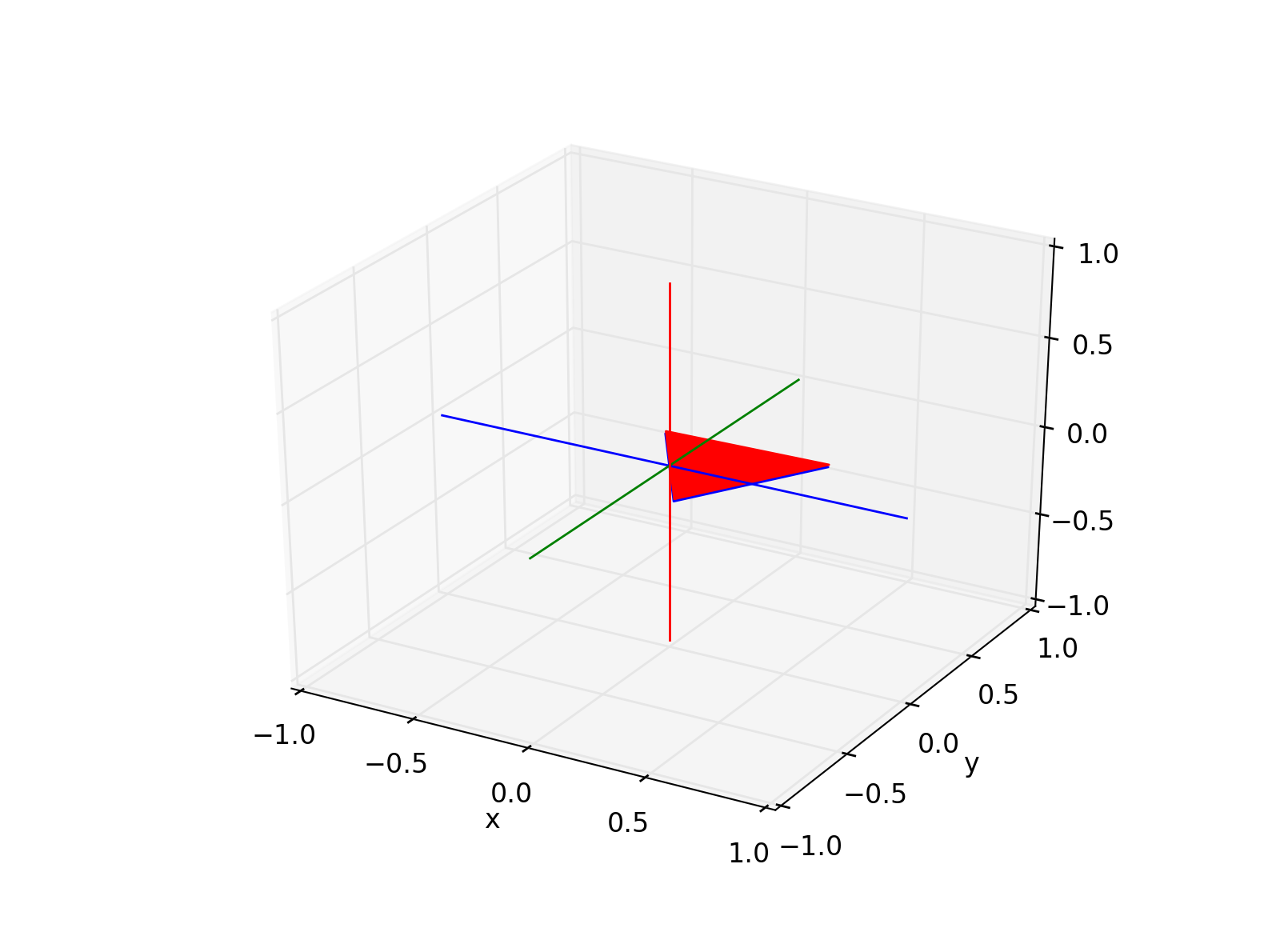
Visualize 3D orientations.¶
Installation¶
The simplest way to install skinematics is a two-step process
>>> pip install scikit-kinematics
However, you can also install from the source files. To do this, just go to the root directory of the package, and type
>>> python setup.py install
Note: After skinematics is installed, I typically import it in Python with:
>>> import skinematics as skin
Upgrading¶
For upgrading to the latest version, you have to type
>>> pip install --upgrade --no-deps scikit-kinematics
Warning: Do not use pip install scikit-kinematics -U, since that command also upgrades dependencies such as numpy. This can break e.g. WinPython, since the numpy-version including MKL may be replaced by one without MKL.
Dependencies¶
numpy, scipy, matplotlib, pandas, sympy
Testing¶
The easiest way to test the package is with unittest. Open a terminal, and type (on the command-line!):
>>> cd [_your_installation_dir_]\skinematics\tests
>>> python -m unittest
Modules¶
Indices and tables¶
Note
