Vectors¶
Routines for working with vectors These routines can be used with vectors, as well as with matrices containing a vector in each row.
Functions¶
vector.angle()… Angle between two vectorsvector.GramSchmidt()… Gram-Schmidt orthogonalization of three pointsvector.normalize()… Normalization of a vectorvector.project_onto_line()… Projection of one vector onto anothervector.project_into_plane()… Projection of one vector onto anothervector.plane_orientation()… Orientation of plane defined by three pointsvector.q_shortest_rotation()… Quaternion indicating the shortest rotation from one vector into another.vector.rotate_vector()… Rotation of a vectorvector.target2orient()… Convert target location into orientation angles
Details¶
Routines for working with vectors These routines can be used with vectors, as well as with matrices containing a vector in each row.
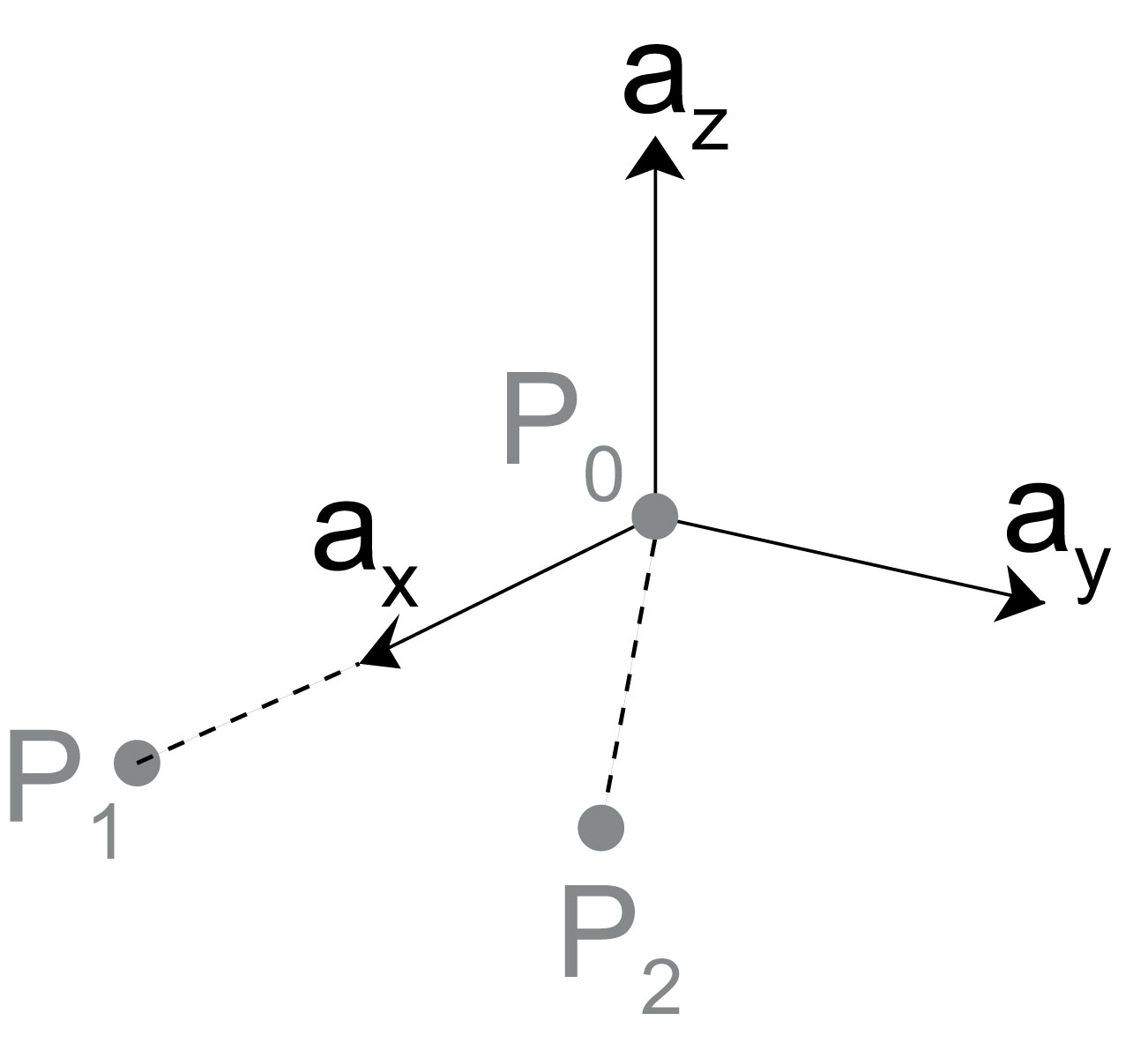
- vector.GramSchmidt(p0, p1, p2, rotmat=False)[source]¶
Gram-Schmidt orthogonalization
- Parameters:
p0 (array (3,) or (M,3)) – coordinates of Point 1:
p1 (array (3,) or (M,3)) – coordinates of Point 2
p2 (array (3,) or (M,3)) – coordinates of Point 3
rotmat (if 'True', the output corresponds to a rotation matrix;) – if ‘False’ (default), the output corresponds to the inverse of the rotation matrix (i.e. rows = coordinate unit vectors)
- Returns:
Rmat – flattened rotation matrix, or its inverse (see option ‘rotmat’)
- Return type:
array (9,) or (M,9)
Example
>>> P0 = np.array([[0, 0, 0], [1,2,3]]) >>> P1 = np.array([[1, 0, 0], [4,1,0]]) >>> P2 = np.array([[1, 1, 0], [9,-1,1]]) >>> GramSchmidt(P0,P1,P2) array([[ 1. , 0. , 0. , 0. , 1. , 0. , 0. , 0. , 1. ], [ 0.6882472 , -0.22941573, -0.6882472 , 0.62872867, -0.28470732, 0.72363112, -0.36196138, -0.93075784, -0.05170877]])
Notes
The flattened rotation matrix (option: “rotmat=True”!) corresponds to
\[\mathbf{R} = [ \vec{e}_1 \, \vec{e}_2 \, \vec{e}_3 ]\]
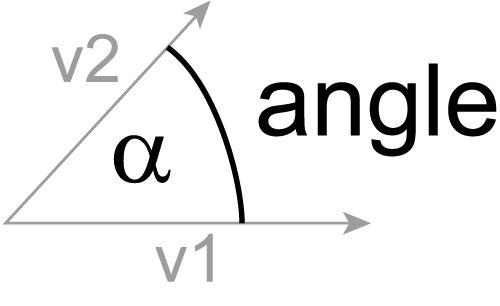
- vector.angle(v1, v2)[source]¶
Angle between two vectors
- Parameters:
v1 (array (N,) or (M,N)) – vector 1
v2 (array (N,) or (M,N)) – vector 2
- Returns:
angle – angle between v1 and v2
- Return type:
double or array(M,)
Example
>>> v1 = np.array([[1,2,3], >>> [4,5,6]]) >>> v2 = np.array([[1,0,0], >>> [0,1,0]]) >>> skinematics.vector.angle(v1,v2) array([ 1.30024656, 0.96453036])
Notes
\[\alpha =arccos(\frac{\vec{v_1} \cdot \vec{v_2}}{| \vec{v_1} | \cdot | \vec{v_2}|})\]
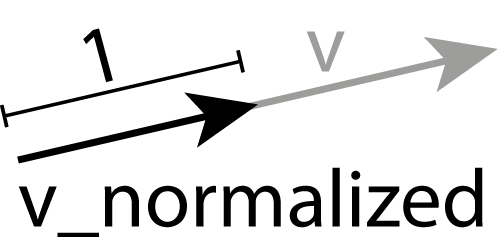
- vector.normalize(v)[source]¶
Normalization of a given vector (with image)
- Parameters:
v (array (N,) or (M,N)) – input vector
- Returns:
v_normalized – normalized input vector
- Return type:
array (N,) or (M,N)
Example
>>> skinematics.vector.normalize([3, 0, 0]) array([[ 1., 0., 0.]])
>>> v = [[np.pi, 2, 3], [2, 0, 0]] >>> skinematics.vector.normalize(v) array([[ 0.6569322 , 0.41821602, 0.62732404], [ 1. , 0. , 0. ]])
Notes
\[\vec{n} = \frac{\vec{v}}{|\vec{v}|}\]
- vector.plane_orientation(p0, p1, p2)[source]¶
The vector perpendicular to the plane defined by three points.
- Parameters:
p0 (array (3,) or (M,3)) – coordinates of Point 0
p1 (array (3,) or (M,3)) – coordinates of Point 1
p2 (array (3,) or (M,3)) – coordinates of Point 2
- Returns:
n – vector perpendicular to the plane
- Return type:
array (3,) or (M,3)

Example
>>> P0 = np.array([[0, 0, 0], [1,2,3]]) >>> P1 = np.array([[1, 0, 0], [4,1,0]]) >>> P2 = np.array([[1, 1, 0], [9,-1,1]]) >>> plane_orientation(P0,P1,P2) array([[ 0. , 0. , 1. ], [-0.36196138, -0.93075784, -0.05170877]])
Notes
\[\vec{n} = \frac{ \vec{a} \times \vec{b}} {| \vec{a} \times \vec{b}|}\]
- vector.project(v1, v2, projection_type='1D')[source]¶
Deprecated function, calls ‘project_onto_line’ or ‘project_into_plane’. Project one vector onto another, or into the plane perpendicular to that vector.
- v1array (N,) or (M,N)
projected vector
- v2array (N,) or (M,N):
target vector
- projection_typescalar
Has to be one of the following:
1D … projection onto a vector (Default)
2D … projection into the plane perpendicular to that vector
- v_projectedarray (N,) or (M,N)
projection of v1 onto v2
- vector.project_into_plane(vec: ndarray, n_plane: ndarray) ndarray[source]¶
Projection into the plane perpendicular to n, through zero
- Parameters:
vec (array (3,) or (M,3)) – Vector(s) to be projected
n_plane (array (3,)) – Vector perpendicular to plane (does not have to be normalized)
- Returns:
v_projected – Vector(s) projected into the plane
- Return type:
array (3,) or (M,3)
Notes
\[ \begin{align}\begin{aligned}\vec{n} = \frac{ \overrightarrow{n_{plane}}}{| \overrightarrow{n_{plane}} |}\\\vec{v}_{plane} = \vec{v} - (\vec{v} \cdot \vec{n})\vec{n}\end{aligned}\end{align} \]
- vector.project_onto_line(data: ndarray, to: ndarray) ndarray[source]¶
Project one vector onto another.
- Parameters:
data (array (N,) or (M,N)) – original vector(s)
to (array (N,) or (M,N):) – target vector(s)
- Returns:
v_projected – projection of v1 onto (normalized) v2
- Return type:
array (N,) or (M,N)
Notes
Either ‘vec’ or ‘to’ has to be 1-dimensional!
\[ \begin{align}\begin{aligned}\vec{n} = \frac{ \vec{to} }{| \vec{to} |}\\\vec{v}_{line} = (\vec{v} \cdot \vec{n}) \vec{n}\end{aligned}\end{align} \]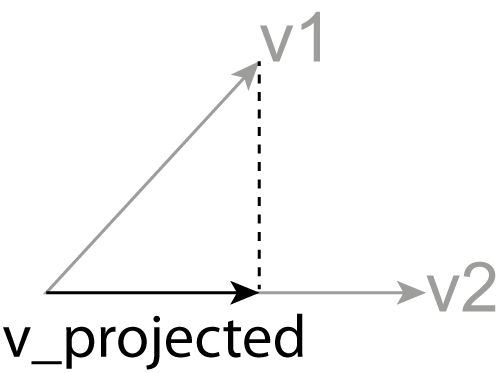
Example
>>> v1 = np.array([[1,0,0], >>> [1,1,0]]) >>> v2 = np.r_[1,1,1] >>> skinematics.vector.project_onto_line(v1,v2) array([[0.33333333 0.33333333 0.33333333] [0.66666667 0.66666667 0.66666667]])
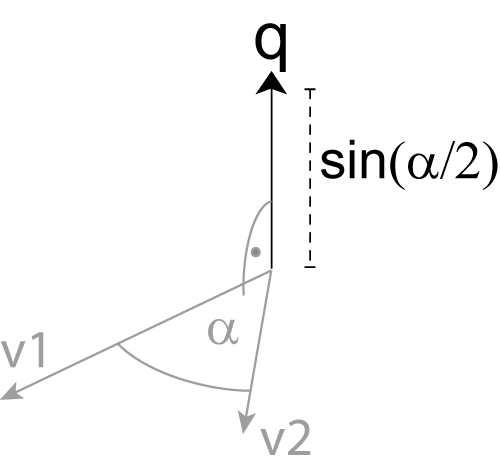
- vector.q_shortest_rotation(v1, v2)[source]¶
Quaternion indicating the shortest rotation from one vector into another. You can read “qrotate” as either “quaternion rotate” or as “quick rotate”.
- Parameters:
v1 (ndarray (3,)) – first vector
v2 (ndarray (3,)) – second vector
- Returns:
q – quaternion rotating v1 into v2
- Return type:
ndarray (3,)
Example
>>> v1 = np.r_[1,0,0] >>> v2 = np.r_[1,1,0] >>> q = qrotate(v1, v2) >>> print(q) [ 0. 0. 0.38268343]
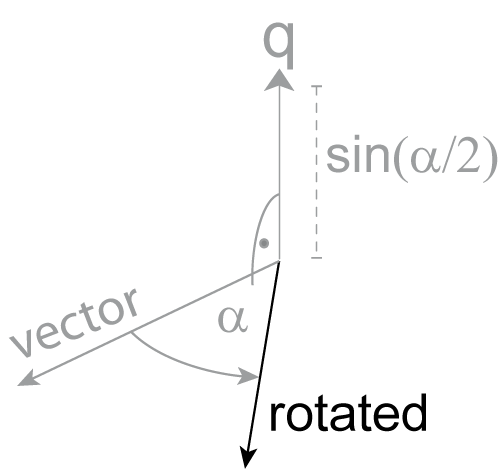
- vector.rotate_vector(vector, q)[source]¶
Rotates a vector, according to the given quaternions. Note that a single vector can be rotated into many orientations; or a row of vectors can all be rotated by a single quaternion.
- Parameters:
vector (array, shape (3,) or (N,3)) – vector(s) to be rotated.
q (array_like, shape ([3,4],) or (N,[3,4])) – quaternions or quaternion vectors.
- Returns:
rotated – rotated vector(s)
- Return type:
array, shape (3,) or (N,3)
Notes
\[q \circ \left( {\vec x \cdot \vec I} \right) \circ {q^{ - 1}} = \left( {{\bf{R}} \cdot \vec x} \right) \cdot \vec I\]More info under http://en.wikipedia.org/wiki/Quaternion
Examples
>>> mymat = eye(3) >>> myVector = r_[1,0,0] >>> quats = array([[0,0, sin(0.1)],[0, sin(0.2), 0]]) >>> quat.rotate_vector(myVector, quats) array([[ 0.98006658, 0.19866933, 0. ], [ 0.92106099, 0. , -0.38941834]])
>>> quat.rotate_vector(mymat, [0, 0, sin(0.1)]) array([[ 0.98006658, 0.19866933, 0. ], [-0.19866933, 0.98006658, 0. ], [ 0. , 0. , 1. ]])
- vector.target2orient(target, orient_type='quat')[source]¶
Converts a target vector into a corresponding orientation. Useful for targeting devices, such as eyes, cameras, or missile trackers. Based on the assumption, that in the reference orientation, the targeting device points forward.
- Parameters:
target (array (3,) or (N,3)) – Input vector
orient_type (string) –
Has to be one the following:
Fick … Rz * Ry
nautical … same as “Fick”
Helmholtz … Ry * Rz
quat … quaternion
- Returns:
orientation – Corresponding orientation For rotation matrices, same sequence as the matrices [deg]. For quaternions, the quaternion vector.
Note that the last column of the sequence angles, and the first column of the quaterion, will always be zero, because a rotation about the line-of-sight has no effect.
- Return type:
array (3,) or (N,3)
Example
>>> a = [3,3,0] >>> b = [5., 0, 5] >>> skinematics.vector.target2orient(a) [ 0. 0. 0.38268343]
>>> skinematics.vector.target2orient([a,b]) [[ 0. 0. 0.38268343] [ 0. -0.38268343 0. ]]
>>> skinematics.vector.target2orient(a, orient_type='nautical') [ 45. -0. 0.]
