




The challengeThe ability to maintain constant eye-contact with objects of interest during passive and active movements of the body is apparently of great interest for survival. To this end, nature has provided us with a complex, highly flexible structure, the neck. Through the use of about 30 muscles and several sensory systems, the position of the head is controlled. If for instance external accelerations are applied to the body, like when driving a car, acceleration sensors located in the inner ear, the otoliths, help to maintain head position. We have chosen this paradigm as a starting point for our investigation. Modeling the head-neck system represents a challenging task since adequate representations of several sub-systems and their interaction is required. The points to be addressed are:
|
|
|
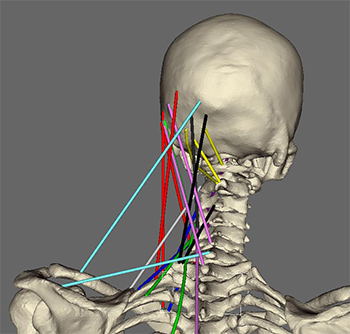
The ModelOur MKS-simulations of the human neck are to our knowledge the first such simulations that are based on a realistic description of human neck-mechanics and muscles. To incorporate realistic postural reflexes, our model also uses simulated signals from the balance system (LOTO Hagenberg). Currently our simulation can demonstrate the following responses under simplified conditions:
|
The Goal
We are aiming for a active model of the human head-neck, which uses postural reflexes to remain stable on the torso, during natural movements like walking around. (LOTO Pavia)